艾利特EC63機器人坐標(biāo)系與軸操作
發(fā)布時間:2021-12-07 18:39:21 作者:顯揚科技
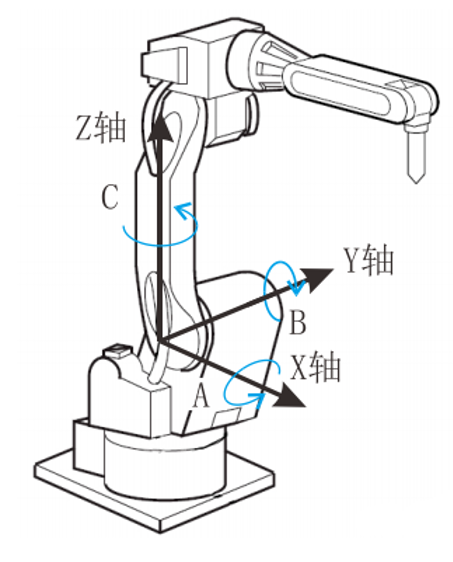
一、關(guān)節(jié)坐標(biāo)系
艾利特EC63機器人沿各軸軸線進行單獨動作,所使?的坐標(biāo)系成為關(guān)節(jié)坐標(biāo)系。關(guān)節(jié)坐標(biāo)系在機器人調(diào)試完成后就設(shè)定完成,不可更改。
二、直?坐標(biāo)系
艾利特EC63機器人直?坐標(biāo)系也叫大地坐標(biāo)系。每種機器人類型對應(yīng)的直?坐標(biāo)系?向不同,對應(yīng)的直?坐標(biāo)原點位置也不同。
機器人相關(guān)參數(shù)設(shè)定完成后,則直?坐標(biāo)的零點和?向就確定,直?坐標(biāo)系的?向不能進行修改。
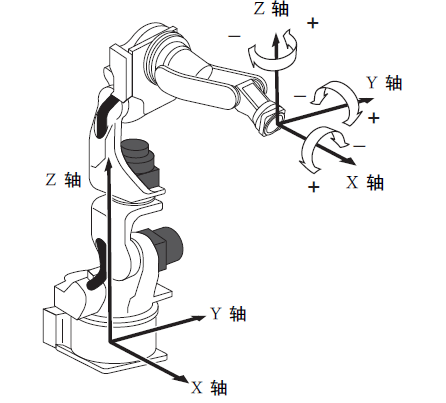
機器人處于非奇異點位置時,均可沿設(shè)定的X軸、Y軸、Z軸平?移動。對于六軸機器人,還可執(zhí)?Rx、Ry、Rz旋轉(zhuǎn),Rx繞X軸旋轉(zhuǎn),Ry繞Y軸旋轉(zhuǎn),Rz繞Z軸旋轉(zhuǎn),遵從右?螺旋法則。以六軸機器人為例,各運動?向如下圖所示。
三、?具坐標(biāo)系
工具坐標(biāo)系把機器人腕部法蘭盤所持?具的有效?向作為Z軸,并把坐標(biāo)定義在工具的尖端點。
工具坐標(biāo)的運動不受機器人位置或姿勢的變化影響,主要以工具的有效?向為基準(zhǔn)進?運動。所以,工具坐標(biāo)運動最適合在?具姿勢始終與?件保持不變、平?移動的應(yīng)?中使?。
?戶可根據(jù)實際工具情況進?設(shè)定工具坐標(biāo)系0-7號。

四、用戶坐標(biāo)系
?戶坐標(biāo)系是以操作艾利特EC63機器人示教三個點來定義的,機器人沿所指定的?戶坐標(biāo)系各軸平行移動。
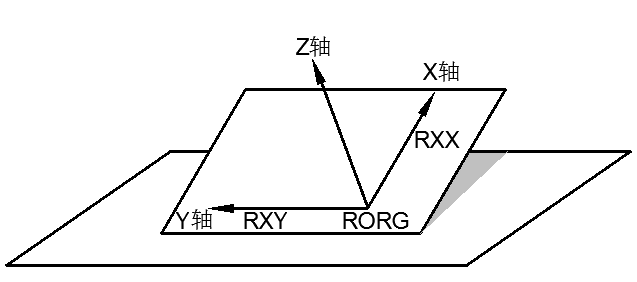
?戶可根據(jù)需要,設(shè)定?戶坐標(biāo)系0-7號。

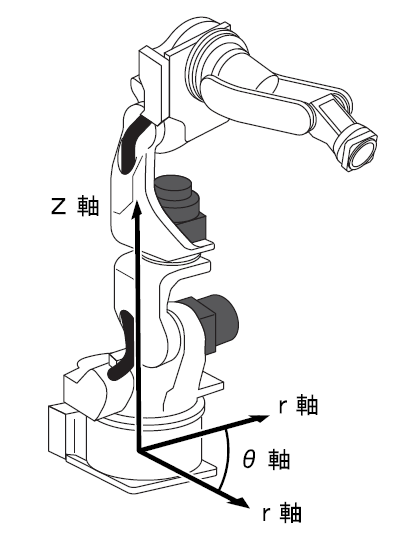
五、圓柱坐標(biāo)系
在圓柱坐標(biāo)系,艾利特EC63機器人以本體Z軸為中?旋轉(zhuǎn)運動,或與Z軸成直?平?運動。圓柱坐標(biāo)系的θ軸、R軸、Z軸?向如下圖所示。
六、控制點保持不變的操作
控制點保持不變的操作是指不改變?具尖端點的位置(控制點),只改變工具姿勢的軸操作。除關(guān)節(jié)坐標(biāo)以外的坐標(biāo)系均可進行該操作。
在控制點不變的操作中,由于選擇不同的坐標(biāo)系,所以各手腕的回轉(zhuǎn)也各異。
在直?/圓柱坐標(biāo)系中,以本體軸的X、Y、Z為基準(zhǔn),作回轉(zhuǎn)運動。
在工具坐標(biāo)系中,以?具坐標(biāo)的X、Y、Z軸為基準(zhǔn),做回轉(zhuǎn)運動。

在?戶坐標(biāo)系中,以?戶坐標(biāo)系的X、Y、Z為基準(zhǔn)作回轉(zhuǎn)運動。

顯揚科技專注研發(fā)并產(chǎn)業(yè)化高速高清三維機器視覺設(shè)備、智能協(xié)作機器人系統(tǒng)。顯揚科技創(chuàng)建了一個集高精度視覺傳感器、智能協(xié)作機器人、智能感知與控制系統(tǒng)平臺,讓機器人更加智能、可靠,適用于更多復(fù)雜的應(yīng)用場景。顯揚科技研發(fā)的三維機器視覺設(shè)備精度能達亞微米級,三維數(shù)據(jù)采集幀率高達300幀,具有高精度、大景深、高穩(wěn)定性的優(yōu)勢,已在多個領(lǐng)域成功替代進口同類產(chǎn)品。目前,顯揚科技產(chǎn)品已成功應(yīng)用于食品、電器、陶瓷、物流、教育科技、新零售等行業(yè)。


