Franka機器人代理商丨 為您設計Franka Emika機器人的解決方案
發(fā)布時間:2021-12-03 18:43:52 作者:顯揚科技
Franka Emika 的即用型解決方案非常適合常見應用,也可以作為構建更復雜的自動化案例的絕佳起點。此過程包含以下步驟:
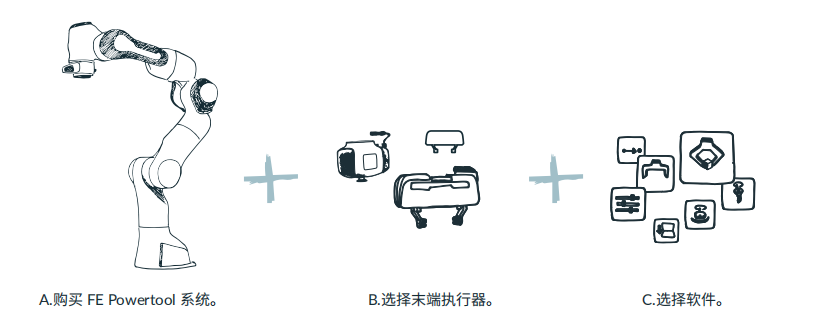
首先是購買PE Powertool系統(tǒng),然后需要選擇適合的末端執(zhí)行器,最后選擇軟件作為支撐。顯揚科技作為Franka Emika的合作伙伴,可以協(xié)助客戶設計最佳的方案,讓高校實驗室和企業(yè)少走彎路。
顯揚科技有限公司作為Franka Emika的合伙伙伴,我們可以提供的服務包含:
1. 可以提供正規(guī)渠道,官方授權的正品全新Franka Emika機器人
2. 產品在行業(yè)內具有絕對的價格優(yōu)勢,并對教育科研領域提供價格優(yōu)惠
3. 質量穩(wěn)定可靠,提供原廠保修保養(yǎng)服務
4. 顯揚科技具備一支數(shù)十人的工程師團隊,可以為客戶提供技術支持和二次開發(fā)服務。
面向研究人員的PE Powertool
Franka Emika Powertool (FE Powertool) 因配備附加的 Franka 控制接口 (FCI),是開展控制和運動算法、抓取策略、交互場景和機器學習等研究和測試的理想平臺。用戶借助 FCI 可與機器人的臂架和抓手建立快速的底層雙向連接。
Franka 控制接口 (FCI)
激活 FCI*,即可通過快速、直接的底層雙向通信將工作站 PC 連接到 FE Powertool 系統(tǒng)。這樣可以提供機器人的當前狀態(tài)并對其實施直接控制 (1 kHz)。
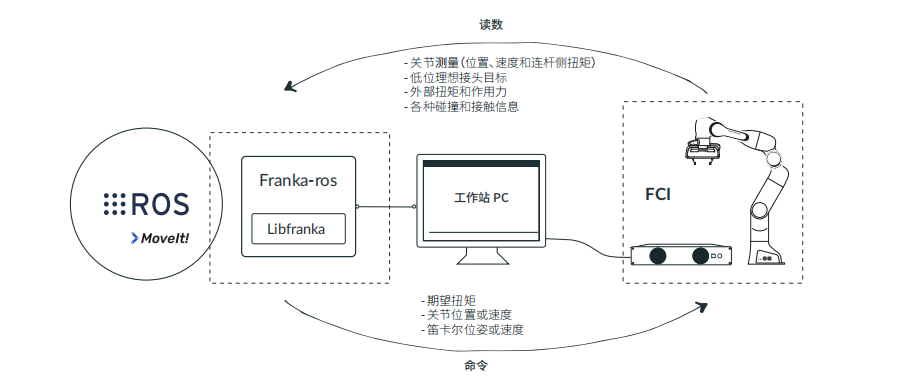
libfranka是Franka Emika提供的開源軟件包, 提供了可在工作站 PC 上運行的 C++ 接口。該軟件包支持通過標準以太網(wǎng)協(xié)議將用戶的自定義應用連接到已激活FCI 的 FE Powertool。franka_ros 可將 FE Powertool 與整個 ROS 生態(tài)系統(tǒng)相連。該軟件包可將 libfranka 集成到 ROS 控制裝置,并包含機器人和末端執(zhí)行器的 URDF 模型和詳細的 3D 網(wǎng)格,便于實現(xiàn)可視化(例如 RViz )和運動學仿真。此外,還可以通過集成 MoveIt! 輕松移動機器人和控制抓手。

